DUAL GNSS / INS
VN-310
The VN-310 is a tactical-grade, high-performance Dual Antenna GNSS-Aided Inertial Navigation System (Dual GNSS/INS). Incorporating the latest inertial sensor and GNSS technology, the VN-310 combines 3-axis accelerometers, 3-axis gyros, 3-axis magnetometers and two Multi-band L1/L2/E5b GNSS receivers into a compact embedded module or ruggedized packaging option to deliver a high-accuracy position, velocity and attitude solution under both static and dynamic conditions.

0.15° - 0.3°
GNSS-Compass Heading (1m)
0.05°- 0.1°
Dynamic Heading
0.015°
Dynamic Pitch/Roll
VN-310
Multi-band GNSS
Integrated L1/L2/E1/E5b GNSS Receiver
High Rate Data
400 Hz Navigation Data
800 Hz IMU Data
External M-Code
Support for external SAASM / M-Code GPS (ICD-GPS-153)
Rugged Device Design
IP 68; DO-160G, MIL-STD-1275E, MIL-STD-461G, MIL-STD-810G
VN-310 E
Multi-band GNSS
Integrated L1/L2/E1/E5b GNSS Receiver
High Rate Data
400 Hz Navigation Data
800 Hz IMU Data
Ultra Low SWaP
31 x 31 x 12 mm;
15 grams; < 1.6 W
External M-Code
Support for external SAASM / M-Code GPS (ICD-GPS-153)
Specifications
ATTITUDE
Range (Heading/Yaw, Roll)
± 180°Range (Pitch)
± 90°Heading (Magnetic)*1
2.0° RMSHeading (INS)*2
0.05°-0.1°, 1σHeading (GNSS-Compass, 1m Baseline)
0.3° RMSPitch/Roll (Static)
0.05° RMSPitch/Roll (INS)*3
0.015°, 1σHeading Mounting Misalignment*5
< 0.05°, 1σPitch/Roll Mounting Misalignment*5
<0.05°, 1σAngular Resolution
0.001°POSITION/VELOCITY
Horizontal Position Accuracy*4
1.0 m RMSVertical Position Accuracy*4
1.5 m RMSRTK Position Accuracy (RTK)*6
1 cm + 1 ppm CEPFree Inertial Position Drift*7
0.5 cm/s²Velocity Accuracy
< 0.02 m/s*2Dependant on a number of factors, contact VectorNav to discuss expected performance in your application
*3With sufficient motion for dynamic alignment.
*4Constant on a per part basis. Can be calibrated out during system integration using boresighting or other alignment processes.
*5With SBAS, clear view of GNSS satellites, good multipath environment, compatible GNSS antenna, and as measured over a 24 hour period.
*6Measured using 1km baseline and patch antennas with good ground planes. Does not account for possible antenna phase center offset errors. ppm limited to baselines up to 20km.
*7Typical rate of growth in error of position estimates after loss of GNSS signal, provided INS full alignment prior to loss.
Range
±15 gIn-Run Bias Stability
< 10 μgNoise Density
0.04 mg/√HzBandwidth
200 HzCross-Axis Sensitivity
±0.05°Range*1
±490°/s (Optional ±2000°/s)In-Run Bias Stability
< 1°/hr (0.6°/hr typ.)Noise Density
5°/hr /√HzBandwidth
210 HzCross-Axis Sensitivity
< 0.05°Range
±2.5 GaussIn-Run Bias Stability
-Noise Density
140 μGauss/√HzSample Rate
250 HzCross-Axis Sensitivity
±0.05°Receiver Type
(2) 184-Channel, L1/L2/E5b GNSSTime-to-First-Fix (Cold)
29 sTime-to-First-Fix (Hot)
1 sAltitude Limit
50,000 mVelocity Limit
500 m/sSize
56 x 56 x 31 mmWeight
160 gInterface Connector
Circular Push-Pull Fischer UltiMate (10-pin x 2; Size 7)GNSS Connector
SMAInput Voltage
12 to 34 VCurrent Draw*1
135 mA @ 24 VPower*1
< 3.3 WDigital Interface*2
RS-422Baud Rate
Up to 921,600GNSS PPS
30ns RMS, 60 ns 99%Input
Sync-InOutput
Sync-Out*2VN-310: Optional RS-232 on Primary Port.
Operating Temperature
-40° to +85° CStorage Temperature
-40° to +85° CMBTF
> 21,000 hoursSpecifications
Range (Heading/Yaw, Roll)
± 180°Range (Pitch)
± 90°Heading (Magnetic)
2.0° RMSHeading (INS)
0.05°-0.1°, 1σHeading (GNSS-Compass, 1m Baseline)
0.3° RMSPitch/Roll (Static)
0.05° RMSPitch/Roll (INS)
0.015°, 1σHeading Mounting Misalignment
0.15°, 1σPitch/Roll Mounting Misalignment
< 0.05°, 1σAngular Resolution
0.001°Horizontal Position Accuracy*4
1.0 m RMSVertical Position Accuracy*4
1.5 m RMSRTK Position Accuracy (RTK)*7
1 cm + 1 ppm CEPFree Inertial Position Drift*8
0.5 cm/s²Velocity Accuracy
< 0.02 m/s*2Dependant on a number of factors, contact VectorNav to discuss expected performance in your application.
*3With sufficient motion for dynamic alignment
*4With SBAS, clear view of GNSS satellites, good multipath environment, compatible GNSS antenna, and as measured over a 24 hour period.
*5Constant on a per part basis. Can be calibrated out during system integration using boresighting or other alignment processes.
*6With SBAS, clear view of GNSS satellites, good multipath environment, compatible GNSS antenna, and as measured over a 24 hour period.
*7Measured using 1km baseline and patch antennas with good ground planes. Does not account for possible antenna phase center offset errors. ppm limited to baselines up to 20km.
*8Typical rate of growth in error of position estimates after loss of GNSS signal, provided INS full alignment prior to loss.
Range
±15 gIn-Run Bias Stability
< 10 μgNoise Density
0.04 mg/√HzBandwidth
200 HzCross-Axis Sensitivity
±0.05°Range
±490°/sIn-Run Bias Stability
< 1°/hr (0.6°/hr typ.)Noise Density
5°/hr /√HzBandwidth
210 HzCross-Axis Sensitivity
< 0.05°Range
±2.5 GaussIn-Run Bias Stability
-Noise Density
140 μGauss/√HzSample Rate
250 HzCross-Axis Sensitivity
±0.05 °Receiver Type
(2) 184-Channel, L1/L2/E5b GNSSTime-to-First-Fix (Cold)
29 sTime-to-First-Fix (Hot)
1 sAltitude Limit
50,000 mVelocity Limit
500 m/sSize
31 x 31 x 12 mmWeight
15 gInterface Connector
24-pin CLRGNSS Connector
U.FLInput Voltage
3.2 to 3.5 VCurrent Draw*1
480mA @ 3.3 VPower*1
< 1.6 WDigital Interface
(2) Serial TTLBaud Rate
Up to 921,600GNSS PPS
30ns RMS, 60 ns 99%Input
Sync-InOutput
Sync-OutOperating Temperature
-40° to +85° CStorage Temperature
-40° to +85° CMTBF
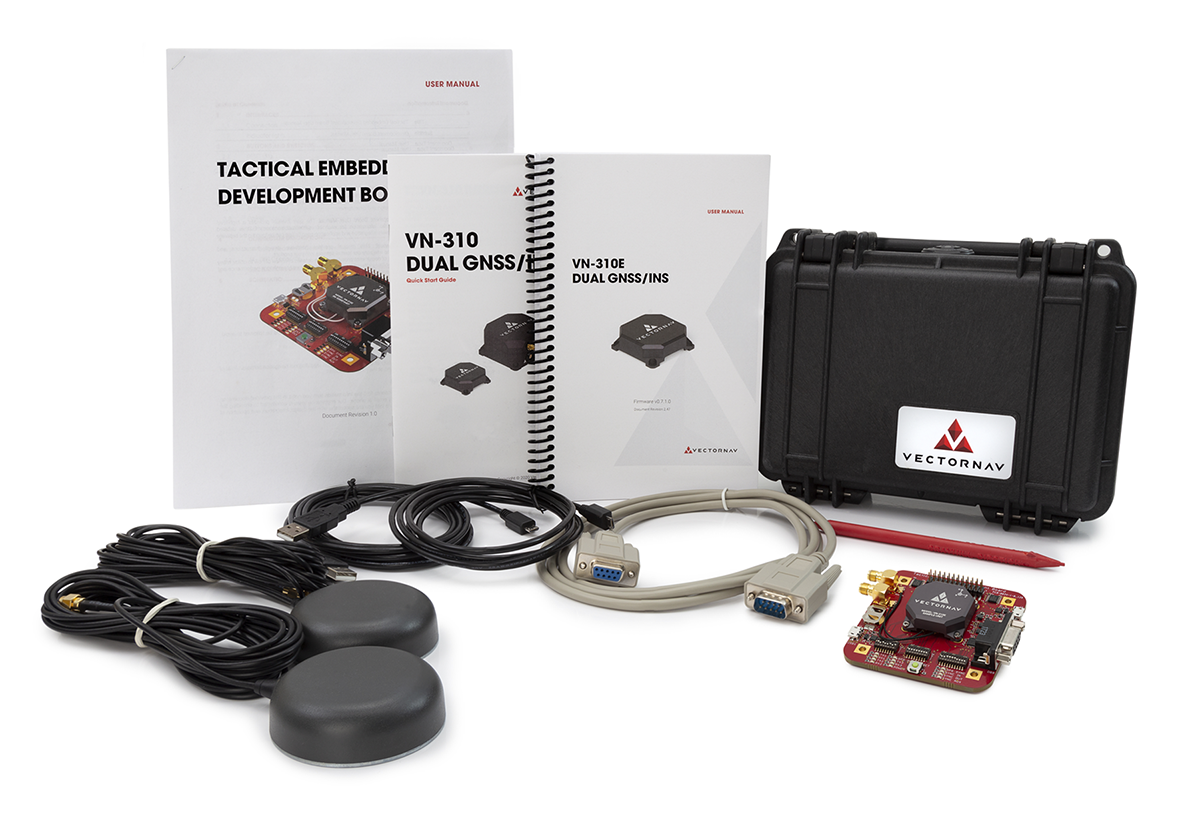
> 22,000 hoursDevelopment Kits
VectorNav development kits are built to move fast. Each kit includes the core hardware and interfaces needed to power up quickly, integrate with your system, and validate performance early. Designed for efficient lab and field evaluation, they reduce setup time and integration risk—helping teams confirm fit, functionality, and performance before committing to full deployment.
REQUEST A DEV KIT